



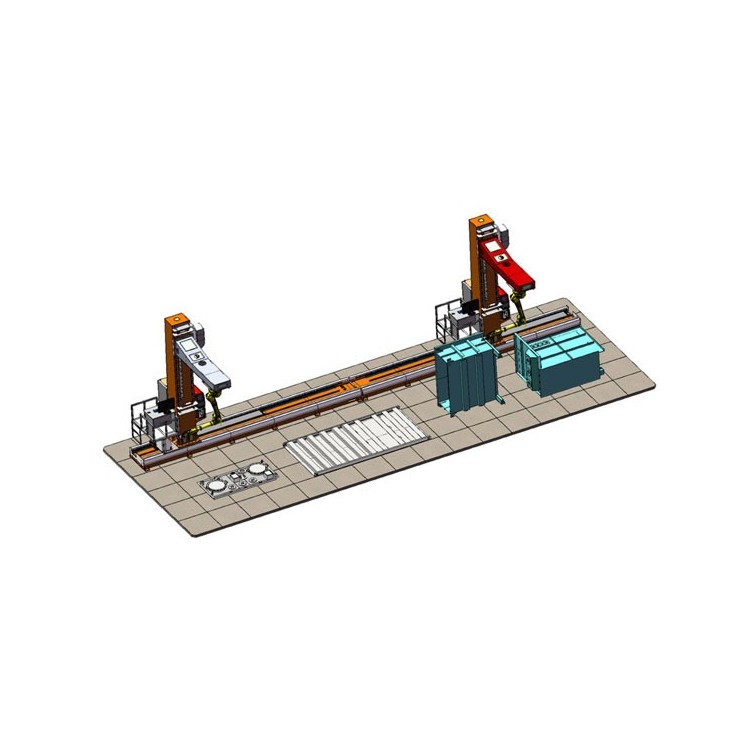


效果图

(标准焊机:奥太)
焊缝总长度 | 62687mm | 所需时间 | |
焊缝个数 | 100 | ||
焊接时间 | 62687mm(焊缝总长) | 3mm/s(焊接速度) | 20896s |
辅助时间 | 100(焊缝个数) | 10s(起收弧时间和空行程时间) | 1000s |
外部轴机构行走时间 | 28(节点数量) | 10s(移动到每个节点的时间) | 280s |
扫描时间 | 62687mm(焊缝总长) | 30mm/s(扫描速度) | 2090s |
单个机器人时长 | 20896+1000+280+2090 | 24266s(总时长) | 6h43min |
以S18-3150/35/0.8油箱为例扫描加焊接时间≈7h | |||
效果图

(高速焊机:威尔泰克)
焊缝总长度 | 62687mm | 所需时间 | |
焊缝个数 | 100 | ||
焊接时间 | 62687mm(焊缝总长) | 6mm/s(焊接速度) | 10448s |
辅助时间 | 100(焊缝个数) | 10s(起收弧时间和空行程时间) | 1000s |
外部轴机构行走时间 | 28(节点数量) | 10s(移动到每个节点的时间) | 280s |
扫描时间 | 62687mm(焊缝总长) | 30mm/s(扫描速度) | 2090s |
单个机器人时长 | 10448+1000+280+2090 | 19818s(总时长) | 3h51min |
以S18-3150/35/0.8油箱为例扫描加焊接时间≈4h | |||
节点扫描操作演示

模型驱动使用演示

智能焊接控制系统
SmartWeld 软件系统是为自主开发系统,其主要功能是通过将机器人、焊机、外部传感等装置进行深度集成,实现基于外部输入进行智能编程并控制机器人及焊接系统实现智能焊接。该系统具备成熟的相机拍照人工辅助识别焊接智能编程功能和基于三维数模软件开发的三维数模智能识别焊缝并生成焊接程序两种模式。系统软件可以自动识别焊缝以及任意规划焊接顺序,然后通过模型自动生成机器人焊接程序,然后启动线激光传感器,对工件所要焊接的焊缝进行扫描, 驱动机器人按照规划的路径进行焊接,无需进行任何现场的示教工作,实现一键启动自动焊接。
SmartWeld 软件可以对工件的焊接顺序进行任意规划,并且可以对工件的焊脚大小进行任意选择。此软件本身具有一套焊接专家基础工艺库。
该软件部署在 PC 系统上,PC 系统可以放置在任何位置,通过无线路由可以实现远程控制,即在办公室可以直接操作现场设备进行焊接。

设备优势:
此套设备集成简单,成本低;
设备操作基本上在 PC 里面的安装软件进行,脱离了示教器的现场编程,提高了编程效率,节省了焊接准备时间;
此软件操作简单,均为中文版,无需进行长时间的培训,对人员的素质要求不高;
此套设备的任意参数的修改方便,无需在示教器上进行,只要在软件上进行即可。
该系统为自主研发,可以进行定制化开发,适用于多种场景。



















 冀公网安备13010402002588
冀公网安备13010402002588